SLAM Datasets
Datasets from the ShanghaiTech Automation and Robotics Center (STAR Center) for research on Simultaneous Localization And Mapping (SLAM).
-
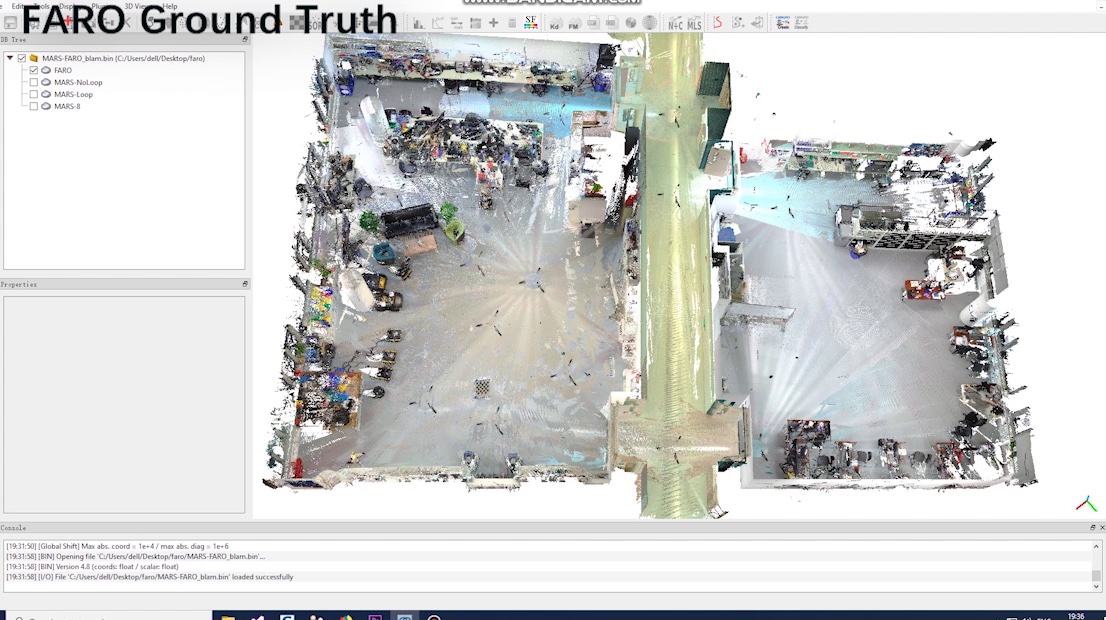
MARS Dataset
Three indoor datasets with the MARS Mapping Robot.- Sensors:
9x RGB camera (5MP, 10Hz)
2x 32beam Velodyne LiDAR
1x IMU - Duration: 704sec
- Distance: 177m
- Size: 120GB
- Scene: Indoor Lab
- Format: ROS 1 Bag
- Ground truth: Tracking System, ground truth map
- Paper: Chen et al. Advanced mapping robot and high-resolution dataset, Robotics and Autonomous Systems, Elsevier, 2020
- Sensors:
-
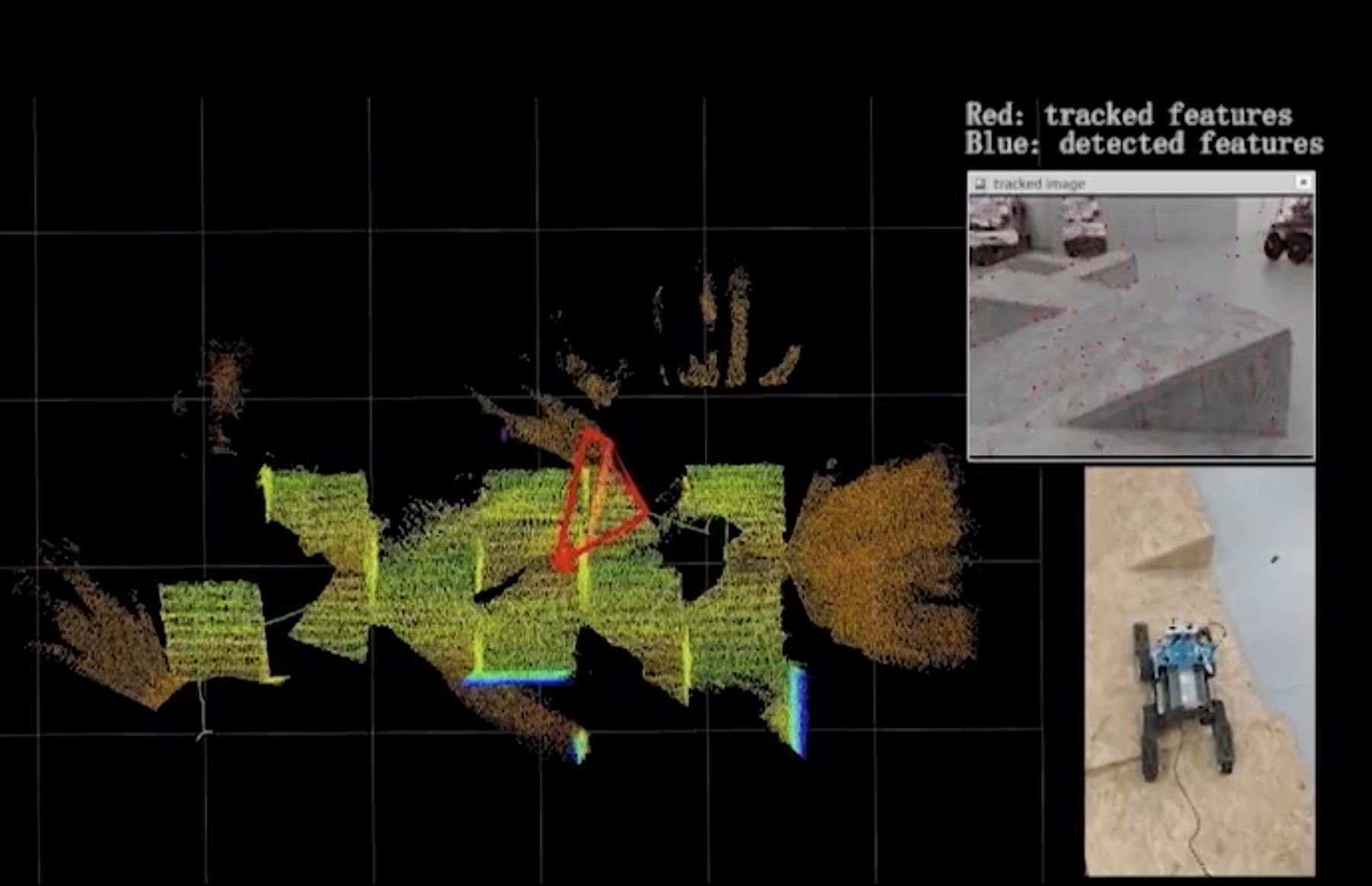
VINS-RGBD
Three datasets collected with an Intel RealSense camera (Handheld, wheeled & tracked robot).- Sensor: RGBD: IntelRealsense D435i with IMU
- Duration: 585 sec
- Distance: 50 m
- Size: 16GB
- Scene: Indoor Lab
- Format: ROS 1 Bag
- Ground truth: Tracking System
- Paper: Shan et al. RGBD-Inertial Trajectory Estimation and Mapping for Ground Robots, Sensors, MDPI, 2019