VECtor Benchmark
A Versatile Event-Centric Benchmark for Multi-Sensor SLAM
The first SLAM benchmark datasets which simultaneously satisfy the following requirements:
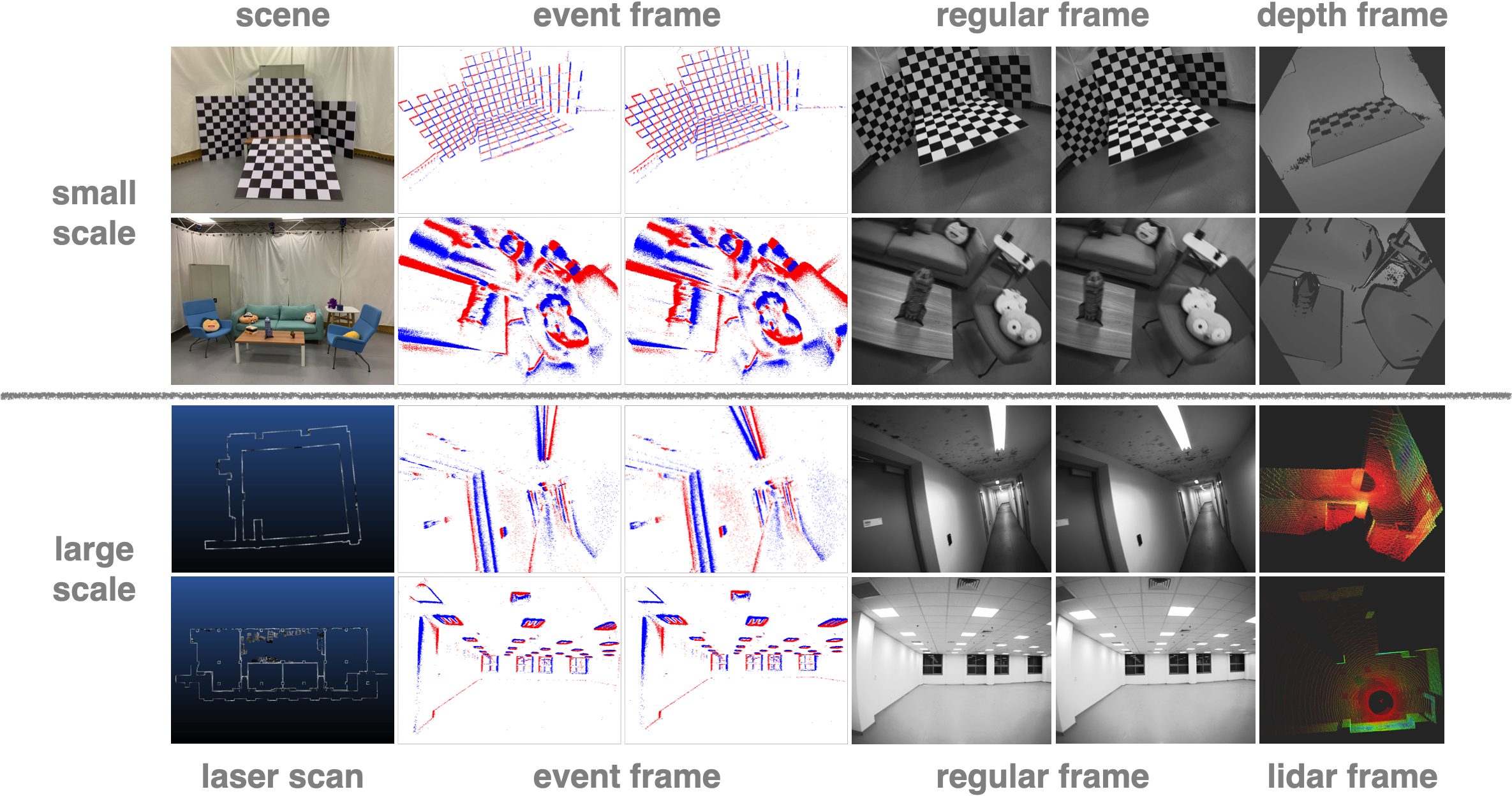
- Captured by a full hardware-synchronized sensor suite that includes an event stereo camera, a regular stereo camera, an RGB-D sensor, a LiDAR, and an IMU;
- Covering the full spectrum of motion dynamics, environment complexities, and illumination conditions;
- Complete six degrees of freedom ground truth signals for both small and large-scale scenarios, and highly-accurate intrinsic and extrinsic calibration.
News
| Sept 20, 2022 | Watch our video presentation for IROS'22 on Youtube or on Bilibili. |
|---|---|
| Jun 30, 2022 | All data sequences have been uploaded. Enjoy! |
| May 18, 2022 | A document containing evaluations for all data sequences can be found at here. |
| Apr 16, 2022 | Dataset toolbox and data samples are now available. |
| Mar 24, 2022 | Calibration toolbox, along with data sequences and calibration results, is now available. |
| Feb 24, 2022 | VECtor Benchmark goes live! |